


|
5 стран Евросоюза займутся созданием робота-барсука
Развитие технологий расширяет возможности и сферу приложения роботов. Так, сейчас разные организации занимаются созданием роботизированных систем для управления наземными, водными и воздушными видами транспортных средств. Кроме того, манипуляторы широко используются на Международной космической станции (МКС), а некоторые прототипы позволяют частично воссоздать локомоцию живых организмов, например рукокрылых. Менее освоенной остается область разработки устройств, способных передвигаться под землей. При этом современные экосистемы содержат многообразие таксонов, обладающих этим навыком, а ранее ученые уже демонстрировали роботов для бурения льда и земли.
О проекте BADGER сообщается на сайте IEEE Spectrum, пишет Naked Science.
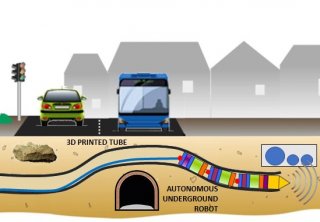
Разработка механизма, который рассчитан на автоматическое передвижение под землей, актуальна и для жилищно-коммунальной сферы, и для экологии. Обычно прокладка коммуникаций предполагает вырывание траншеи, помещение в нее кабелей или труб и восстановление почвенного покрова. Несмотря на сравнительно высокую скорость, такой способ приводит к деформации последнего. Ремонт участка, расположенного под дорогой, при этом требует ограничения движения и дополнительных затрат на вскрытие, а затем реконструкцию дорожного полотна. В качестве альтернативы специалисты из Мадридского университета имени Карлоса III предложили проект робота, который сможет прокладывать ходы самостоятельно.
Система получила название BADGER («барсук»). Согласно замыслу, она будет состоять из нескольких модулей, соединенных подвижными элементами. Головную секцию планируется оснастить буром с виброударным механизмом для разрушения плотных пород. Хвостовая секция при этом будет оборудована 3D-принтером: по мере продвижения устройство сможет укреплять стенки тоннеля напечатанным каркасом. На BADGER также предлагается установить датчики для оценки разности в плотности объектов - это поможет роботу обходить устойчивые к его воздействию препятствия, в частности крупные камни. Его связь с оператором обеспечит наземная станция, подключение к которой будет осуществляться с помощью кабеля.
Проектирование робота началось в январе 2017 года, подробнее о нем мы писали ранее. Теперь стало известно, что кроме университета в работе участвуют шесть организаций из пяти стран Европы - сейчас они согласуют техническое оснащение устройства. Объем финансирования на ближайшие три года составит 3,7 миллиона евро. Между тем к реализации похожего проекта в 2011 году приступили инженеры из Технологического института Джорджии. Он предполагает создание робота для проведения поисковых операций. Как и BADGER, напоминающий змею механизм оснащен заостренной головной частью и способен зарываться в завалы. Связь с поверхностью система также поддерживает посредством кабеля.
Ранее робот помог ученым объяснить аномальную ловкость многоножек.
 Версия для печати
Версия для печати
|
Читайте также





влажность:
давление:
ветер:
- Украина Политическая

Внутрішні трансформації не менш важливі, ніж наша зовнішня обороноздатність, - Яхно - Украина Экономическая

ТОП подарков для яхтсменов - Украина Социальная

Канадський благодійний фонд передав Україні унікальне медичне обладнання - Украина Правовая

СБУ тестує онлайн-доручення про перевірку на митниці - Украина Корпоративная

"Авиалинии Антонова" участвовали в запуске Falcon Heavy



Использование любых материалов, размещённых на сайте, разрешается при условии ссылки на TimeUa.com
Разработано в студии Universal Exports